
➕1!➕2!这些机电科创团队优秀!
发布日期:2023-12-22 阅读次数:233次 来源: 作者:

12月19日,2023年全国大学生机器人科技创新交流营
暨机器人大赛终审决赛在日照落下帷幕
我院学子斩获
全国二等奖1项
全国三等奖2项
再创佳绩!!!


让我们一睹获奖团队风采
二等奖

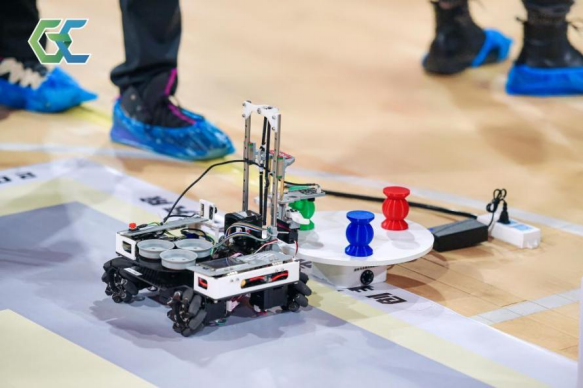
项目名称:基于机器视觉定位的全向移动物流机器人
团队成员:刘展硕、郑旭妍、马浩志、朱劲冰、赵丞达、郭泽宸、赵奕维、黄子恒
指导教师:宋志坤、史红梅
项目简介:这款全向移动物流小车采用了麦克纳姆轮底盘,配备四个42步进电机驱动。车载设备包括升降式机械臂和可旋转的物料放置台。步进电机和舵机通过自主设计的扩展电路板连接至STM32下位机。动作函数被烧录至下位机中,通过上位机发送指令来操控小车。上位机采用树莓派,装备两个摄像头用于获取二维码、图形圆心和物体颜色信息。系统利用Zbar库来解析二维码,同时利用HSV检测和霍夫圆检测实现颜色识别和圆心定位功能。处理后的信息被发送至下位机执行相应运动,系统各个部分协同工作,实现物流机器人的精准定位、识别、抓取和放置功能。此机器人控制精度高,灵活性强,尺寸小,功能丰富等特点,预期应用场景十分广泛。
三等奖
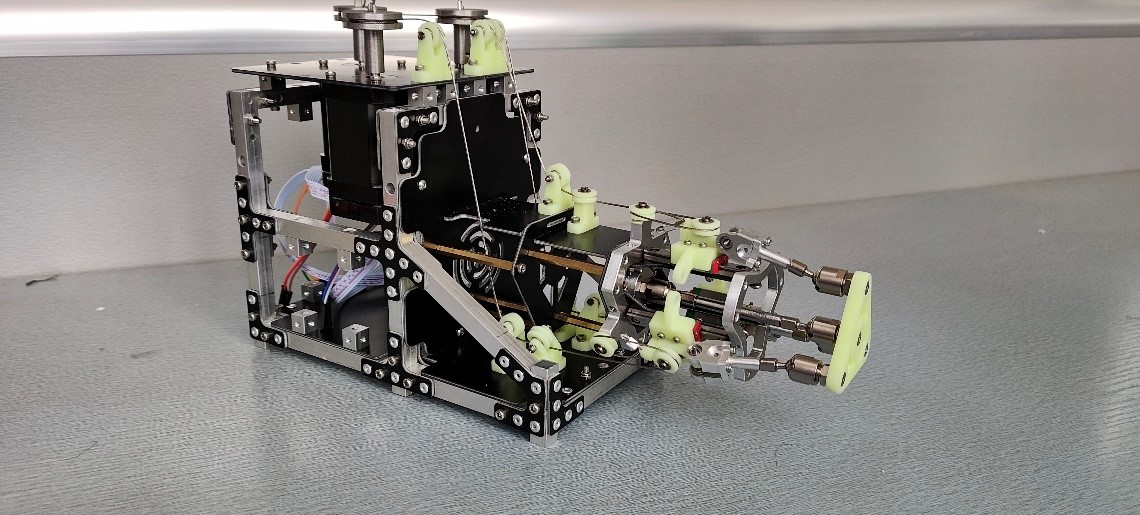
项目名称:具有驱动冗余的仿人柔顺腕关节
团队成员:王昆鹏、张佳伟、周志振、刘英建
指导教师:曲海波
项目简介:该腕关节具有两个转动自由度,为刚柔耦合结构,可以用于工业机器人末端、智能假肢、仿人手臂末端等,具有高刚度承载比,具有较好的人机交互性能。对人体腕关节进行生物结构的仿生,包括骨骼与肌肉系统。骨骼对应于关节的刚性结构部分,肌肉对应于关节的柔性结构部分,设计出初始构型;随后在尺寸上进行仿生,采集人体腕关节的尺寸数据,结合标准件尺寸等,进行结构上的优化设计;根据腕关节的刚柔特性进行控制系统的设计,根据分析得到平台自由度与驱动自由度皆为2,但绳索不能承受拉力的性质,结合结构具有三条支链,便设计三个驱动以保证运动的平稳性与柔顺性,以此设计控制系统,因此是驱动冗余的,最终设计出该腕关节的整体结构。
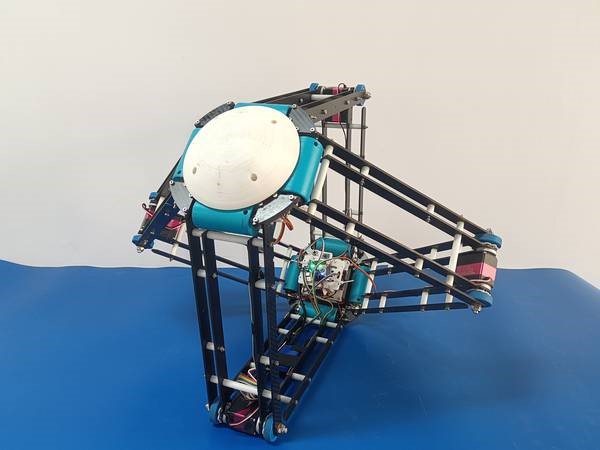
项目名称:高通过性多模式八面体移动机器人
团队成员:王先发、吕景云、胡潇舟、刘宇、马延杰、谭稀岑、陈明
指导教师:刘超
项目简介:本作品创新性地将空间单闭链连杆机构与多面体结构结合,研发出高通过性多模式八面体移动机器人。该移动机器人根据驱动模式的不同,可规划出三种移动模式:只驱动连杆机身,规划出滚动移动模式;只驱动圆柱轮系,规划出轮式移动模式;同时驱动机身和轮系,规划出混合移动模式。该移动机器人可实现不同移动模式快速切换,例如,在地震、坑洞坍塌的救援或废墟中,使用滚动移动模式;在常规结构化路面中,使用轮式移动模式;在大角度低矮斜坡空间、垂直洞中,使用混合移动模式。该移动机器人可在管道检测、军事侦察、灾区救援等领域发挥重要作用,具有极强的地形通过能力。
赛事介绍

全国大学生机器人科技创新交流营暨大赛是共青团中央、工业和信息化部共同主办的一项具有导向性、示范性和群众性的全国竞赛活动,是共青团服务大学生科技创新的重要载体。本届大赛搭建工业机器人、个人及家用服务机器人、公共服务机器人、特种机器人、其他应用领域机器人等5大赛道,共吸引全国30个省、自治区、直辖市及新疆生产建设兵团431所高校的1017件作品参赛。大赛共评出50个特等奖、74个一等奖、94个二等奖、300个三等奖团队。
本届大赛坚持科创育人、实践育人导向,持续提升赛事引导力、影响力和公信力,瞄准机器人前沿技术动态、产业发展趋势和人才培养需求,激发大学生学习机器人知识、交流机器人技术、传播机器人文化、投身机器人行业、攻关机器人关键核心技术的积极性、主动性、创造性,推动机器人领域教育、科技、人才融合发展。